
Robotics engineer
Hi, I'm Anton Vinokurov. I work in robotics, embedded devices programming and AI.
Feel free to check out my github, add me on linked.in or view some of my projects here.
Make sure to try the Precious App
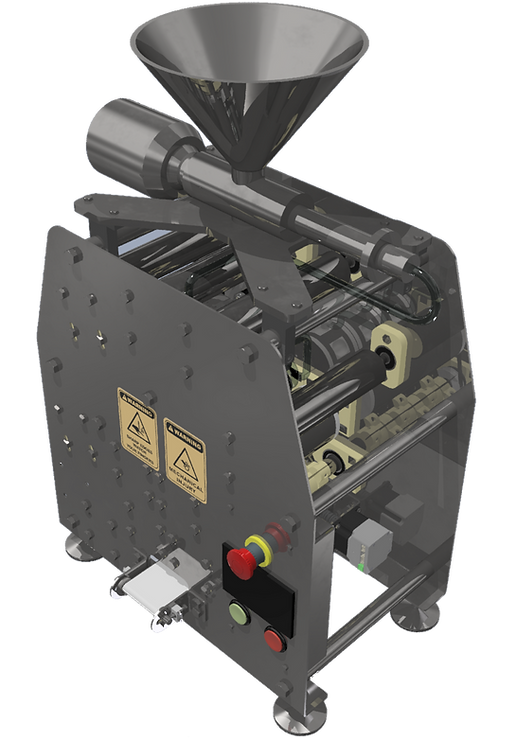
Ravioli machine
A university thesis project / company R&D experiment. Designed a concept of a restaurant-sized ravioli machine using modern industrial automation components. It is capable of high output rate and is easier to use for the pasta maker.

Current project -- stealth startup.
We're creating some cool industrial automation solutions.
ABB IRB-120 Robot control
University group project. 70% Matlab, 30% ABB Robot Studio. Elaborate robot control GUI in Matlab, communication protocol with Robot Studio over TCP sockets. Final milestone: robot used computer vision and played Qwirkle game using simple AI to make decisions.
ABB Flexpicker simulation
University project. Designed a cell for ravioli case packing using ABB Flexpicker delta robot. Animation is done using ABB Robot Studio.


Hexapod localization
University group project. Kalman filters and sensor fusion using IMU, depth vision camera, statically placed Sick Lidar and pre-defined localization poles. GUI and processing done on remote machine in Matlab. An on-board computer (Latte Panda) uses C++ to send data from sensors. Path planning with grids and A*.
London Hackspace:
Hexapod experimental
Countless days and nights spent in London Hackspace in 2015 learning all of the ways how to hack things. Etched PCBs but hand, added vias by hand using a puncher, 3D printed, created DIY battery packs, made the hexapod move using basic servos and Python on Raspberry Pi.


